The PipeDream Robot is a project led by Red Whittaker from the Robotics Institute at Carnegie Mellon University. This robot is able to inspect pipes and detect the volume of uranium deposits on the walls. It combines optical triangulation, which measures the top of the deposit, and inductive sensors, which assess the pipe’s metal surface. The robot can determine permissible thicknesses of deposits as thin as 0.4 millimeters. In this project I was part of the Mechanical Team and I succesfully accomplishedd the following tasks:
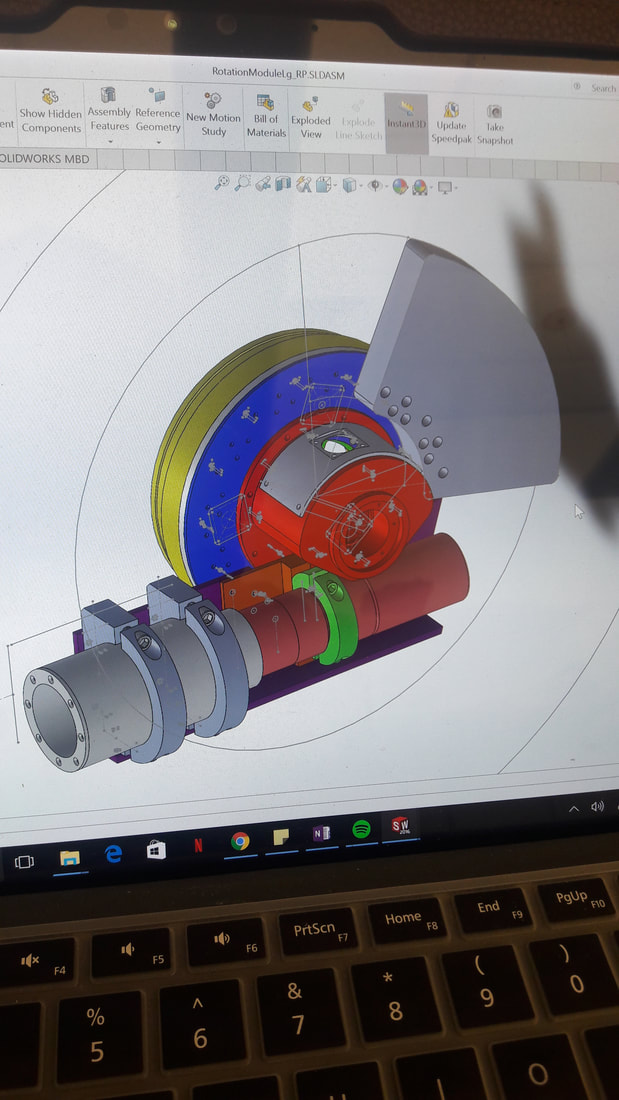
- Suspension design and analysis using the Motion Analysis tool in Solidworks 2016.
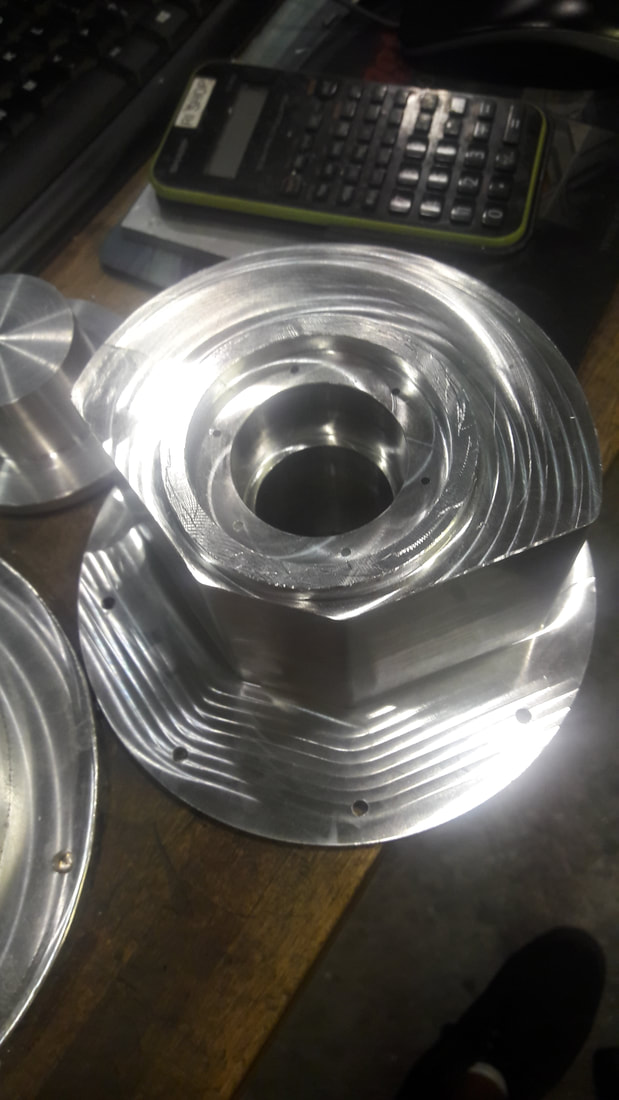
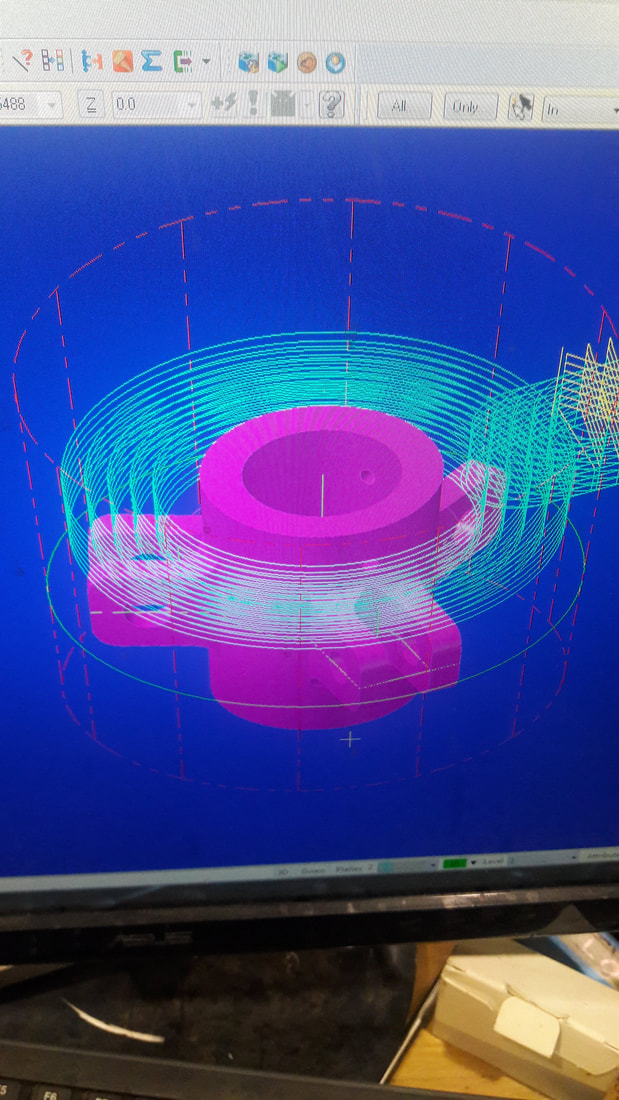
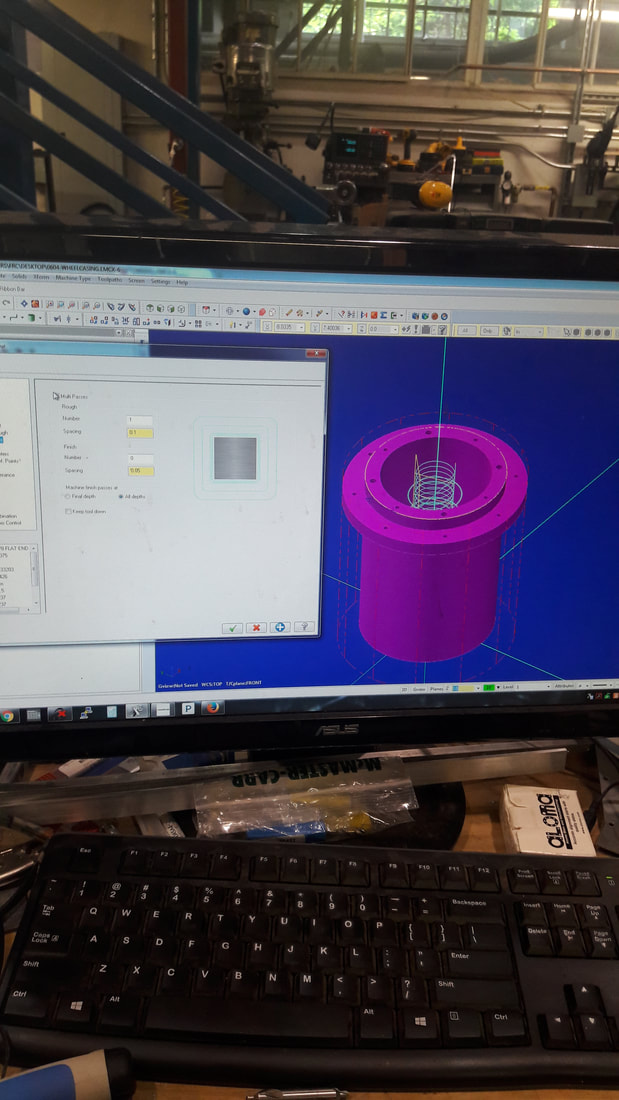
- Creation of various CAM files for different parts of the robot using MasterCam and Autodesk Fusion 360.
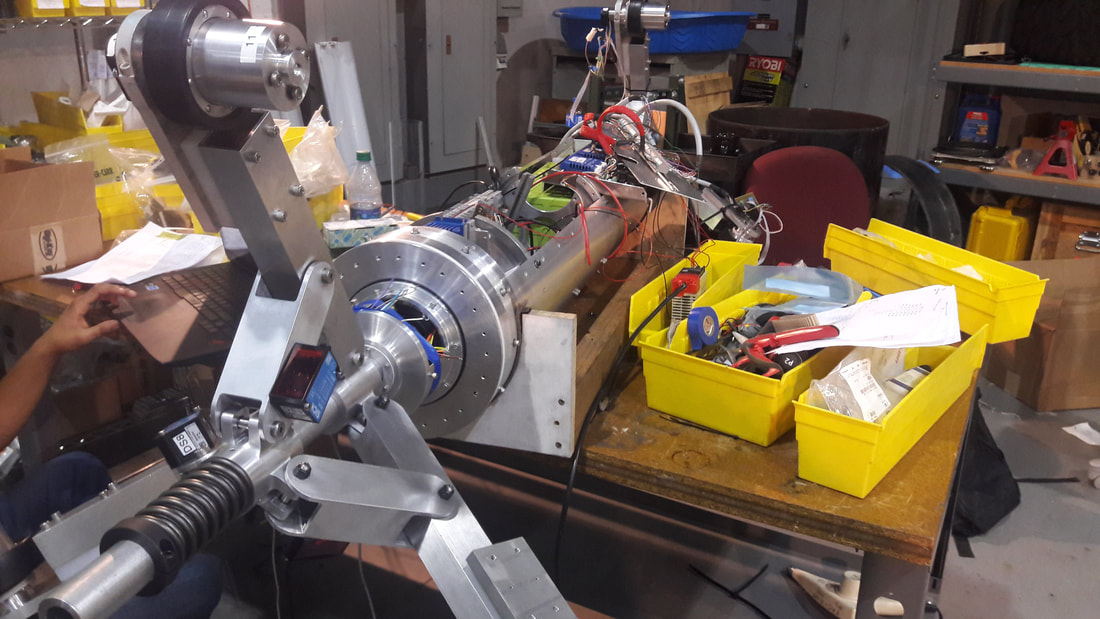
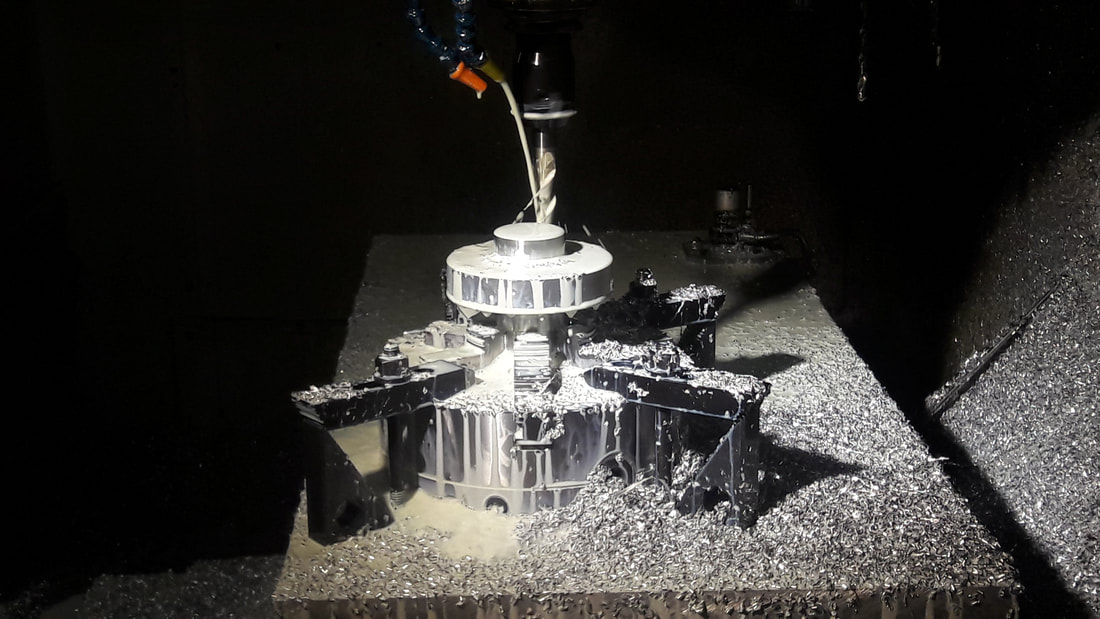
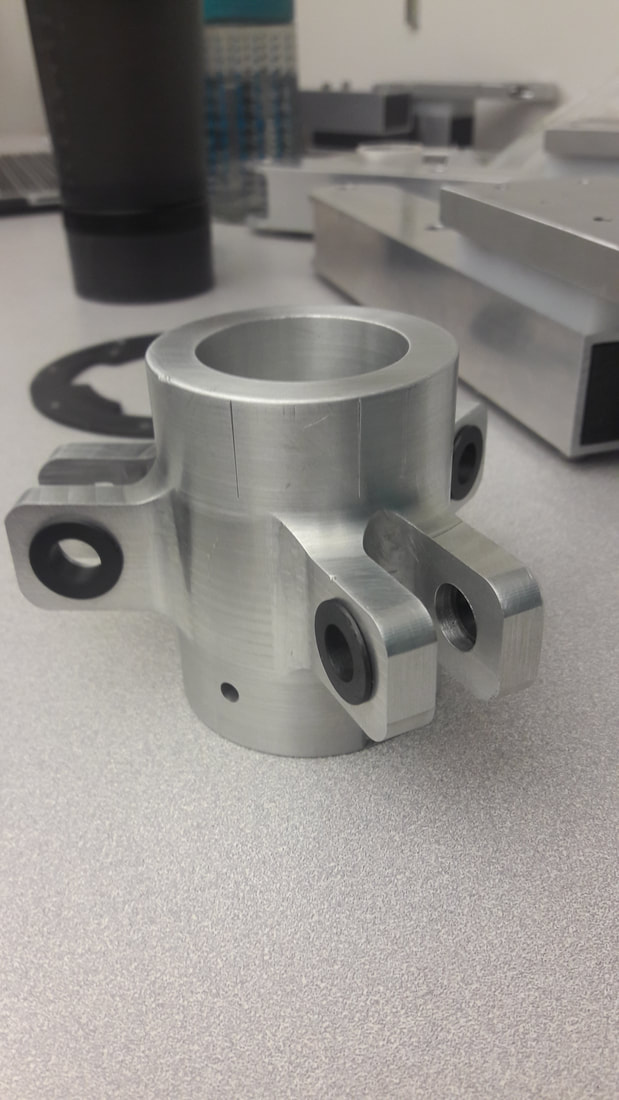
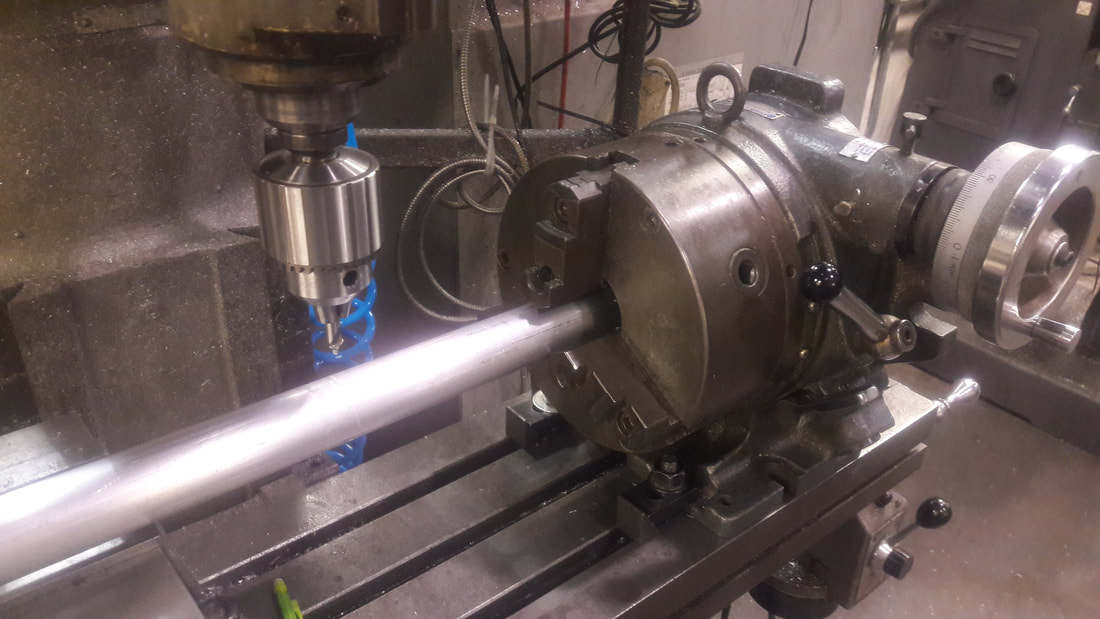
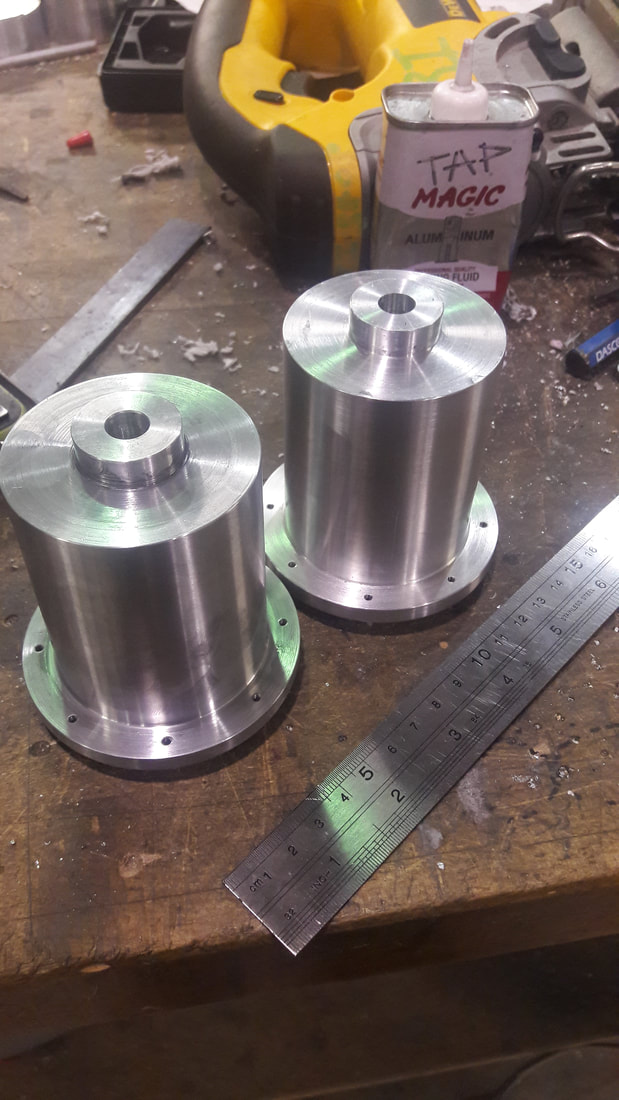
- Fabrication of several parts using the manual milling machine, CNC milling machine, manual lathe and CNC lathe.
- Assembly of the robot