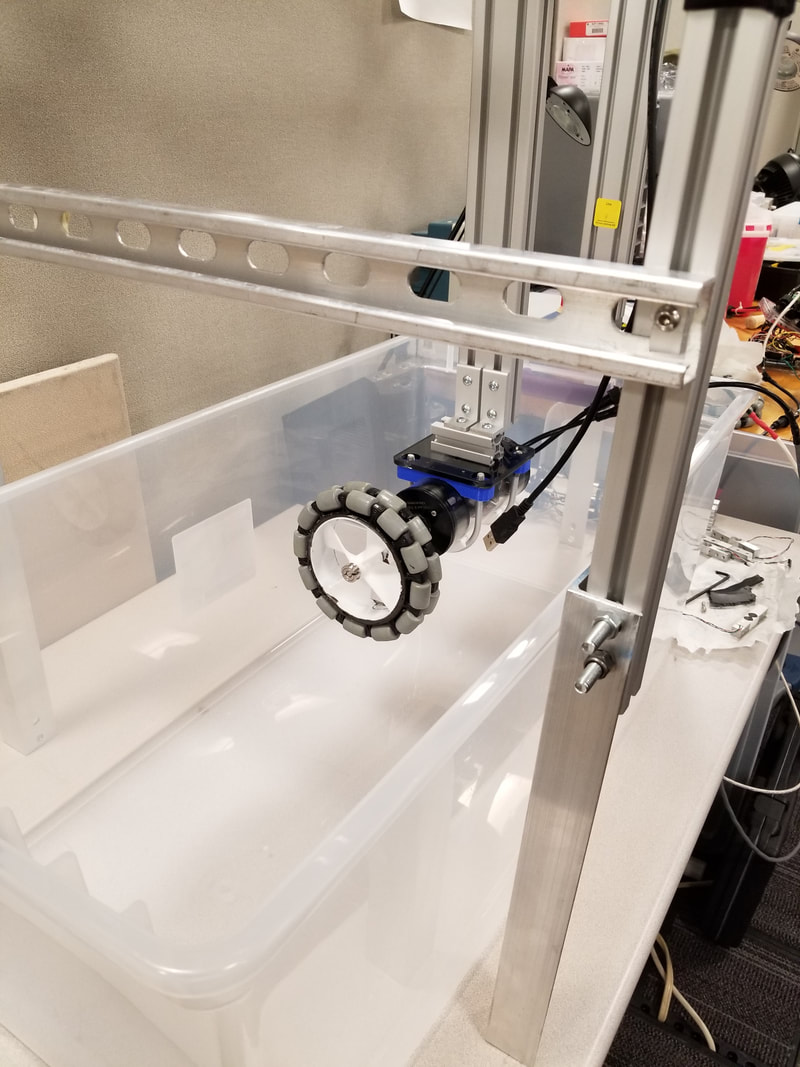
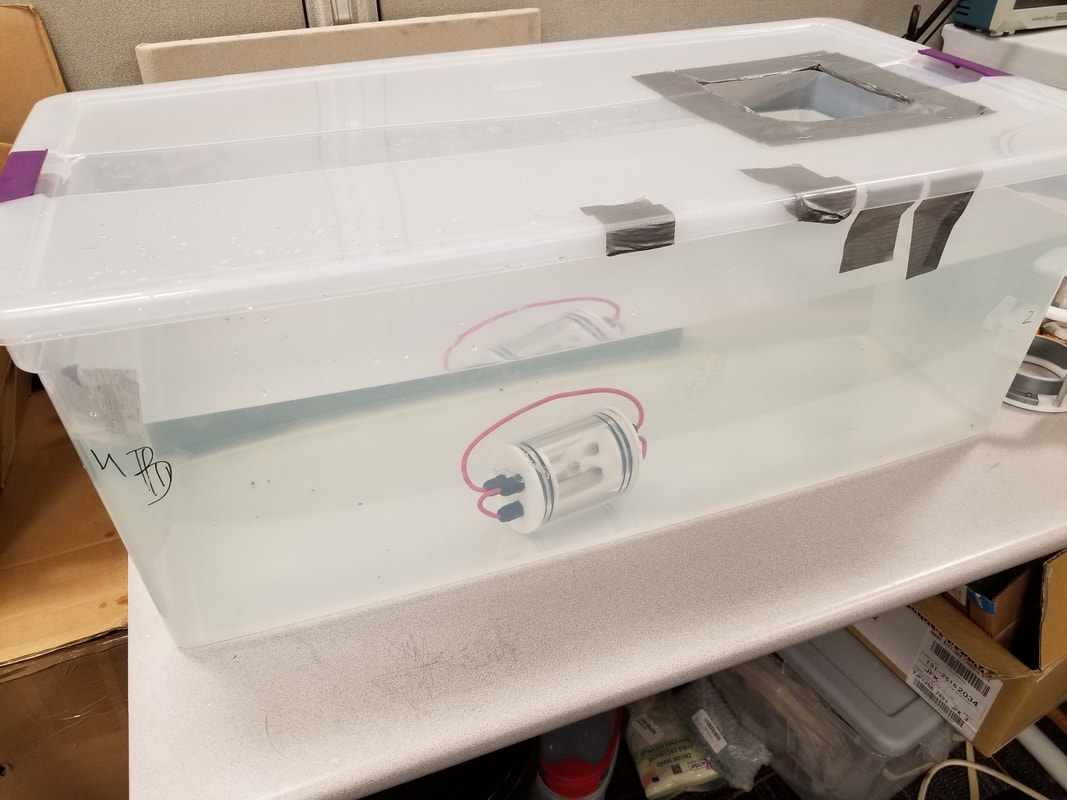
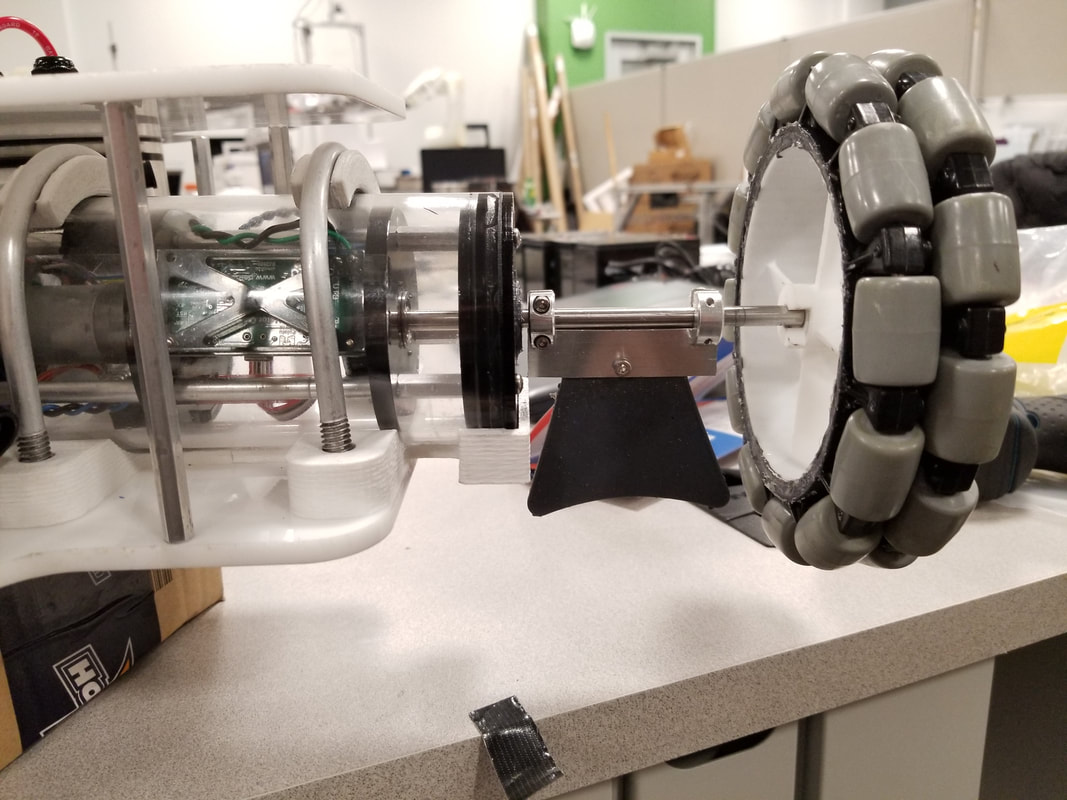
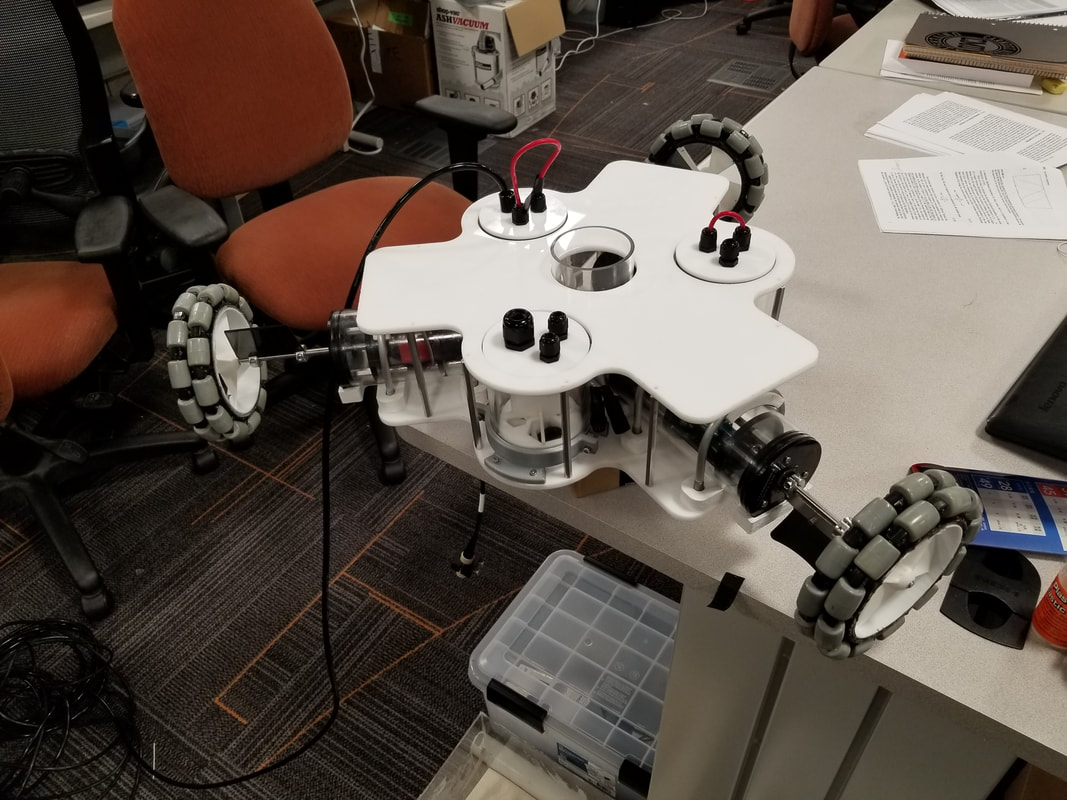
Underwater Robot is the research project I have been working on for the Computational Engineering and Robotics Lab (CERLAB) from Carnegie Mellon University. This robot is able to follow a path, inspect the hull of a ship and clean the surface. In this project I'm in charge of the design, analysis and test of the robot and I'm also in charge of the hardware and wiring.